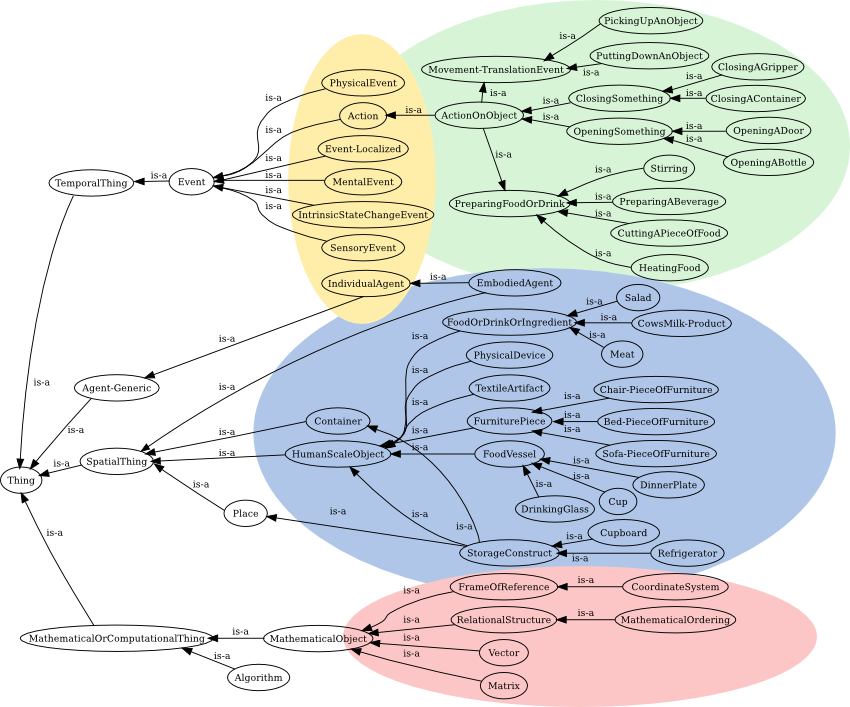
Overview of the KnowRob upper ontology
SpatialThing
- Map of an environment
- Point, a zero-dimensional thing with a location
- Place a relevant place in the environment
- Trajectory, e.g. of the arm or the robot base
- SurfaceRegion, different sides like the front or the back of an object
- EnduringThing-Localized, all tangible objects that can be assigned a location
- EmbodiedAgent
- PhysicalDevice, an object that serves as a tool in the widest sense
- Connection-Physical for any kind of joint
- HumanScaleObject
- ConstructionArtifact for walls, ceiling, floor, doors, etc
- FurniturePiece for tables, cupboards, chairs, etc
- AnimalBodyPart: Hands, legs, fingers,…
- FoodOrDrink: edible and drinkable stuff
TemporalThing
- TimeInterval (e.g. time points, date, time of the day)
- Situation, e.g. a posture or a grasp
- Event
- SensoryEvent, e.g. the perception of an object
- StateChangeEvent, e.g. heating, freezing, vaporization
- Action → PurposefulAction
- Perceiving (similar to SensoryEvent, but in the action context)
- VoluntaryBodyMovement, e.g. Reaching or ReleasingGrasp (Movements that are not directly manipulating an object)
- ActionOnObject (any kind of object interaction)
- ControllingSomething: tap, electrical device, …
- HoldingAnObject (different grasps, no movement involved)
- Movement-Translation: picking up, putting down, or moving objects, walking around, …
- RemovingSomething: cleaning activities
- OpeningSomething: bottle, cupboard, drawer, …
- ClosingSomething: bottle, cupboard, drawer, …
MathematicalThing
- Units
- Mathematical objects like coordinate systems, matrices, vectors etc
